
[ad_1]
– Commercial –

This Namaste Robotic, whose mechanical body could be fabricated from recycled supplies, displays folks inside its 100cm vary utilizing an ultrasonic module.
Detecting anybody inside this vary, it greets the particular person with ‘Namaste’ symbolized by each arms joined collectively in conventional Indian greeting.
The robotic is flexible and could be deployed in numerous settings equivalent to enterprise places, parks, retailers, and many others, to increase greetings. Regardless of its main perform, the robotic is designed to encourage modification for added functions.
– Commercial –
As an illustration, envision the potential for adapting its know-how to be used close to computerized gates at airports or garages.
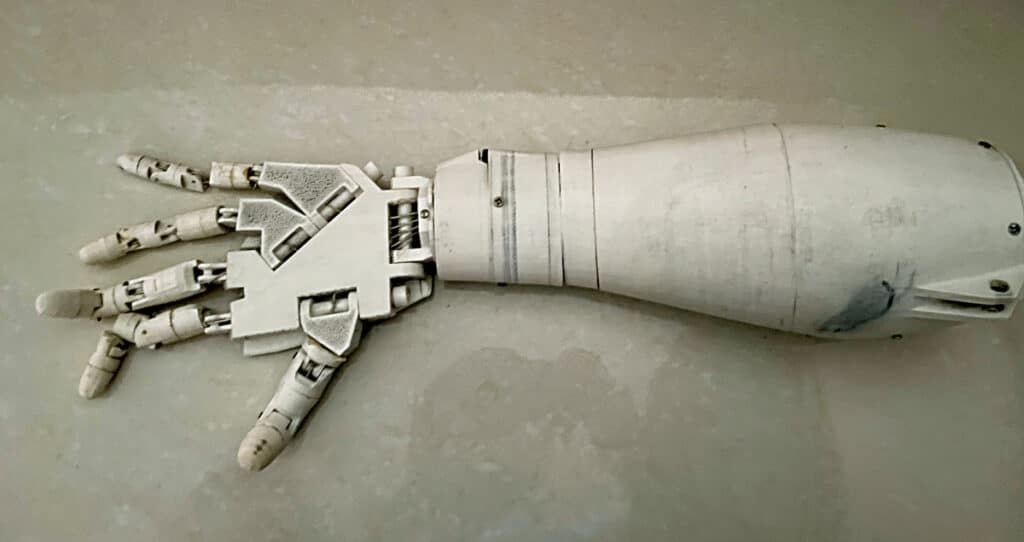 Fig. 1: InMoov robotic hand
Fig. 1: InMoov robotic hand
Customers have the pliability to substitute the servo with varied actuators for features like robotically opening gates or doorways. Alternatively, a bigger servo could also be hooked up to actuate gates or doorways for computerized opening. The machine is adaptable and could be repurposed for varied functions.
Nonetheless, our focus stays on demonstrating the sensing of human presence, activating the servo motor to maneuver the robotic’s arms, and welcoming folks when somebody approaches.
For the robotic’s mechanical hand, customers should purchase or 3D print a robotic hand just like the inMoov robotic hand, or design a customized robotic construction and physique. Fig. 1 reveals the writer’s prototype of the inMoov hand.
Invoice of MaterialsComponentsQuantityArduino Uno/Mega/Nano (MOD1)1Servo motor SG90 (S1, S2)2Ultrasonic sensor HC-SR04 (MOD2)1Mechanical physique for robotOptionalJumper wires (male-to-male)12Breadboard1
Namaste Robotic Circuit and Working
Fig. 2 illustrates the circuit diagram of the machine, which is predicated on Arduino Uno know-how. It contains Arduino Uno (MOD1), an ultrasonic sensor HC-SR04 (MOD2), two SG90 servo motors (S1, S2), a mechanical physique from recycled supplies, a breadboard, and jumper wires.
Customers have the choice to exchange the Arduino Uno with different boards equivalent to Arduino Mega or Arduino Nano. A quick introduction to the parts used within the robotic is supplied under.
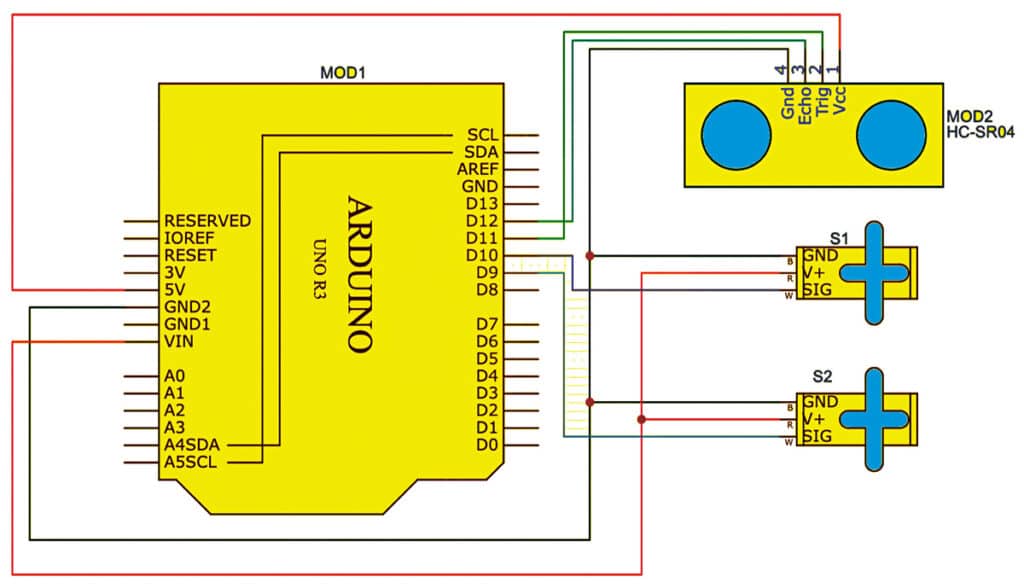 Fig. 2: Circuit diagram
Fig. 2: Circuit diagram
Servo motor SG90: A servo motor is a specialised sort of motor that rotates with nice accuracy and excessive precision. In a servo motor, a management circuit constantly offers suggestions on the present place of the motor shaft, enabling exact rotation. Servo motors are usually rated in kg/cm (kilogram per centimeter), with pastime servo motors rated at 3kg/cm, 6kg/cm, or 12kg/cm. This ranking signifies the load the servo motor can raise at a selected distance.
Arduino board: The Arduino microcontroller board is predicated on an ATmega microcontroller. It options digital enter/output pins, analog inputs, a USB connection, an influence jack, an ICSP header, and a reset button.
Ultrasonic sensor HC-SR04: The HC-SR04 is a distance-measuring sensor with a spread of 2cm to 400cm. The sensor incorporates two ultrasonic transducers, considered one of which is a transmitter that sends ultrasonic sound pulses and the opposite a receiver that listens for mirrored waves, primarily functioning as a sonar.
Code
The code is constructed utilizing the Arduino IDE. Initially, the servo.h library is employed to drive the servo, after which pins for the ultrasonic sensor are outlined. Though any free pins can be utilized, pins D11 and D12 of Arduino Uno are used right here as Trig (2) and Echo(3) pins of the ultrasonic sensor.
The Trig pin sends ultrasonic waves, and the Echo pin receives the waves. The time distinction between sending and receiving is transformed into distance. Consequently, the robotic can sense somebody approaching and, in response, both the servo motor strikes to welcome or any actuator can exchange the servo for the automated opening of doorways, home windows, or storage gates.
Within the setup perform, the servo SIG pins of servo motors S1 and S2 are outlined. Right here D9 and D10 pins of Arduino are used, however any PWM pins could be utilized. Within the loop perform, the gap is checked, and if the gap is under the edge worth that may be set, the servo motor strikes to welcome. Fig. 3 reveals a snippet of the supply code.
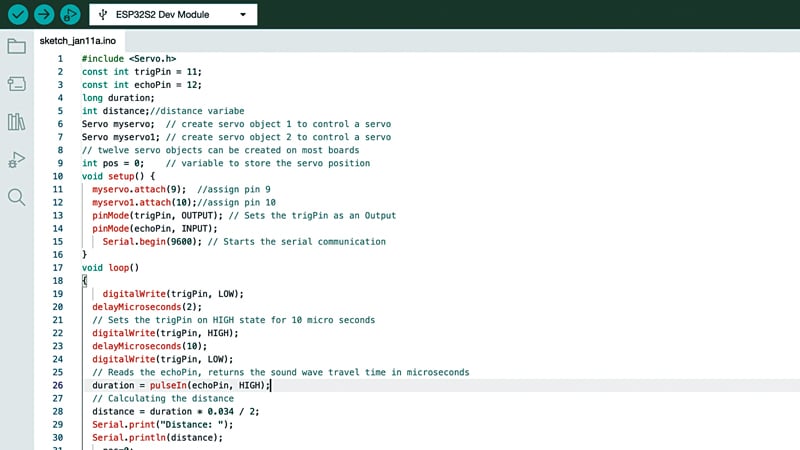 Fig. 3: Snippet of the supply code
Fig. 3: Snippet of the supply code
Mechanical Development
For the mechanical building of the robotic, you possibly can design any physique of your selection, buy one from the market, or 3D print an open-source robotic hand just like the inMoov. For simulation and testing demo functions, you possibly can merely connect the paper-made hand to the servo shaft, as proven in Fig. 4.
 Fig. 4: Mechanical meeting
Fig. 4: Mechanical meeting
Additionally Examine: Attention-grabbing Arduino Initiatives
Testing
First, add the supply code into Arduino Uno utilizing any desktop or laptop computer. Assemble the circuit on a breadboard or general-purpose PCB and full the connections as per the circuit diagram in Fig. 2. The mechanical meeting of each arms needs to be your selection, and the robotic needs to be put in on the entrance gate in order that when somebody passes close to the sensor, the robotic arms and the arms get activated for greeting.
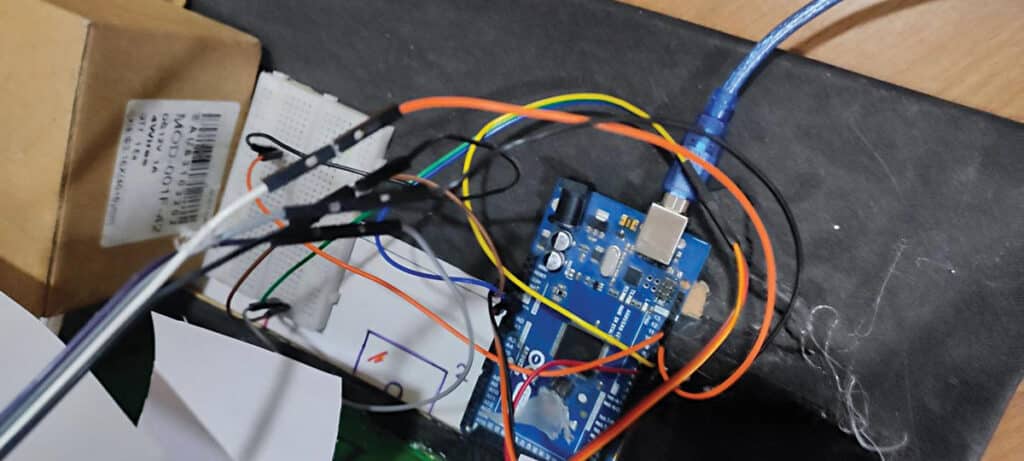 Fig. 5: Closing meeting of the robotic
Fig. 5: Closing meeting of the robotic
The working of the robotic is easy. When anyone is available in entrance of the ultrasonic sensor inside a distance of 100cm, the servo strikes the arms to say ‘Namaste.’ When the particular person strikes away from the robotic, the robotic’s arms and arms transfer again to their regular place. The ultrasonic sensor acts because the eyes of the robotic.
Fig. 5 reveals the ultimate meeting of the robotic, which has been examined in varied conditions and was discovered working effectively.
Navpreet Singh Tung is in-charge of the Synthetic Intelligence and Robotics Lab at Sandeepani Gurukul in Pathankot, Punjab, India
[ad_2]
Supply hyperlink

